

Maximiser l’efficacité de votre aspirateur robot Dans notre ère moderne, les tâches ménagères sont de plus en plus simplifiées grâce à l’évolution technologique qui nous

Optimisez votre espace avec une table de cuisine pour petit appartement Aménager un petit appartement peut s’avérer être un véritable casse-tête. Il est essentiel d’optimiser

Avoir un robot tondeuse est bien, mais savoir quand remplacer sa lame en est encore mieux pour en profiter le plus longtemps possible. La durée

Bons plans pour acheter un aspirateur robot pour le Black Friday Évènement commercial à ne pas rater, le Black Friday est une occasion où de
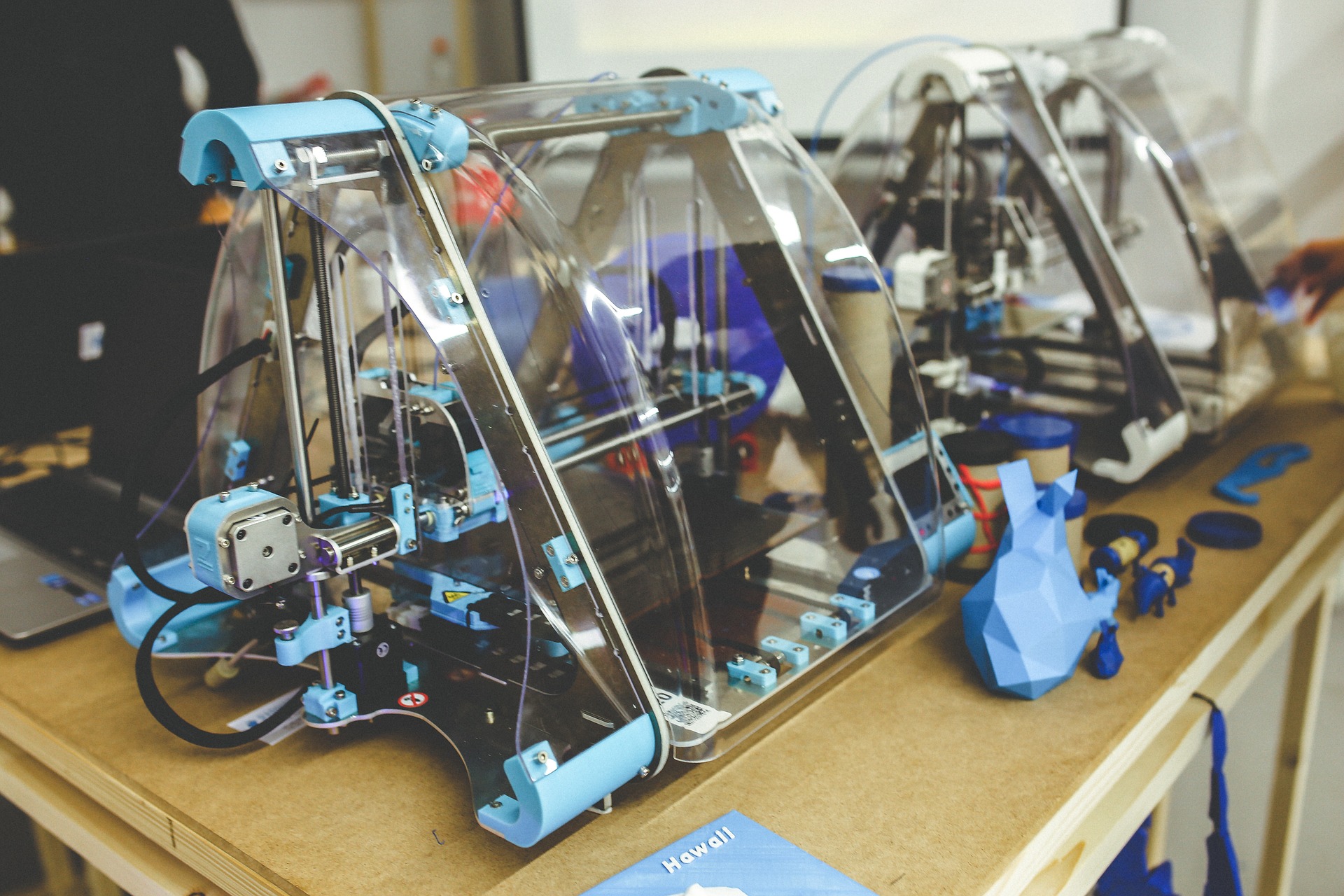
Imprimante 3D, les avantages Gadget révolutionnaire, l’imprimante 3D est un appareil capable de créer toutes sortes d’objets dans un bref délai. Apportant un grand changement

Domotique : quels critères pour choisir son portail automatique ? Choisir un portail automatique pour sa maison constitue une mission à ne pas prendre à la légère.
Minecraft : créer un robot Vous souhaitez créer un robot dans Minecraft ? Sachez que cela ne nécessite pas une procédure complexe et il ne

Mon robot et moi : magazine de cuisine adapté aux robots multifonctions En peu de temps, la revue mon robot & moi est devenue un

Utilité du robot coupe légumes dans sa cuisine Cuisiner de bons petits plats c’est peut-être votre passion. A l’heure où les émissions télé culinaires pullulent,

Un robot dessinateur est une véritable innovation qui représente un excellent concept de récompense pour les petits enfants. En effet, ce dernier restera leur plus proche
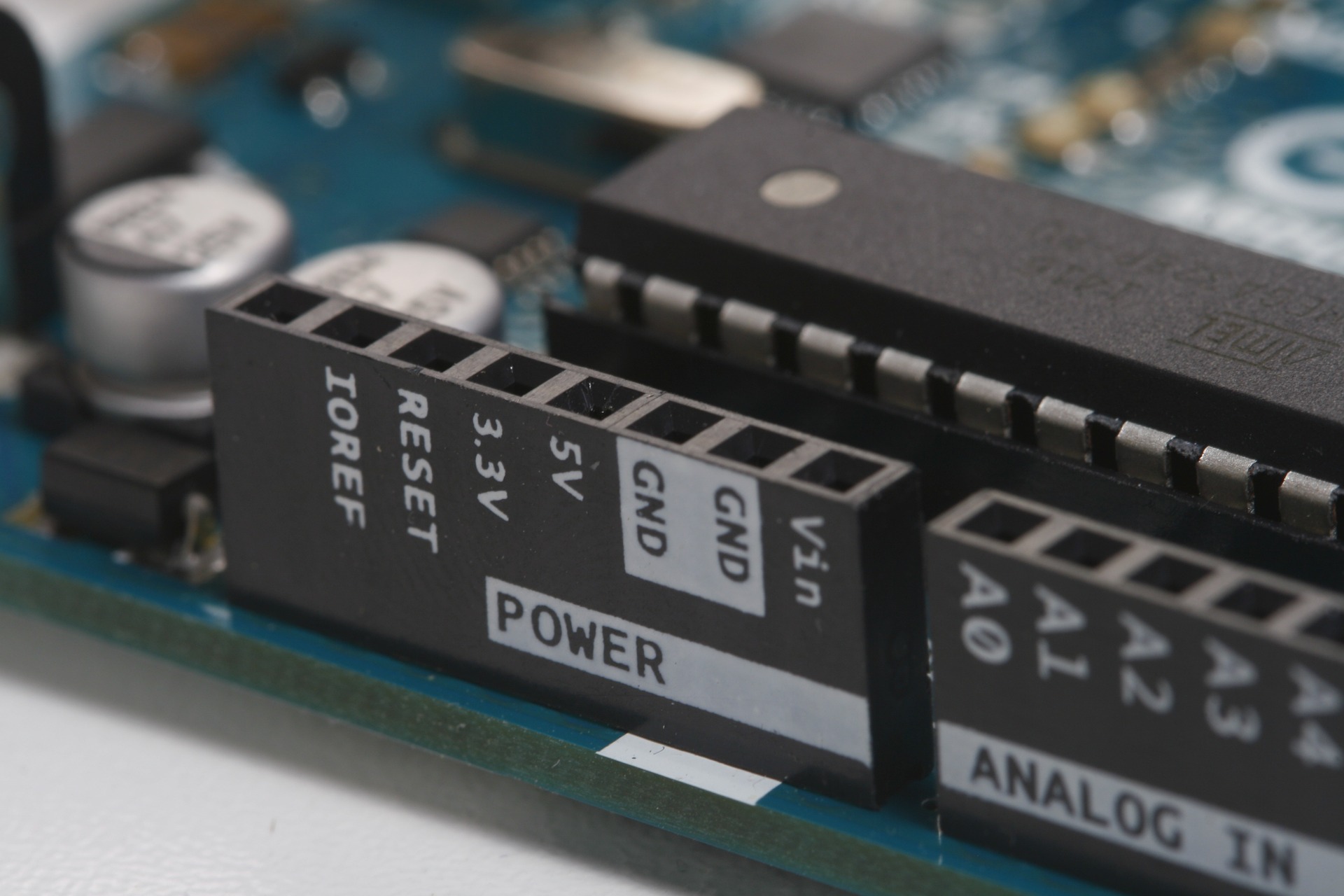
Le domaine de la robotique s’est beaucoup développé au cours de ces dernières années ce qui lui a permis d’entrer dans des registres moins spécialisés

Si vous en avez marre de passer la serpillère et faire la poussière tous les jours chez vous pour nettoyer votre logement, un aspirateur robot

Autrefois, les robots pâtissiers étaient seulement utilisés par les professionnels du monde de la pâtisserie. Aujourd’hui, ce petit bijoux de la technologie est devenu un must have

Les tondeuses à gazon robotisées gagnent en popularité en tant qu'alternative mains-libres aux tondeuses à gazon ordinaires à essence et celles électriques. Étant donné qu'un

Professionnel ou amateur, si vous cherchez à être plus performant en cuisine et épater vos convives avec des mets dignes d’un restaurant étoilé, il faut

Un robot aspirateur peut vous simplifier la vie. Ces machines peuvent vous aider à gagner du temps dans vos tâches, mais cela dépend fortement de